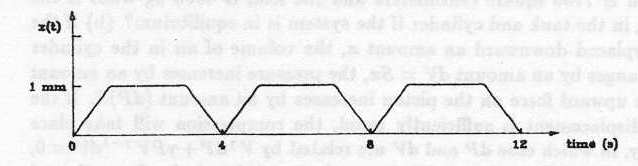
Figure 1.10
1.10 Mechanical Impedance
For a driven harmonic oscillator, the quantities x, dx/dt, d2x/dt2 and Fo exp(iw t) are called respectively the complex displacement, complex velocity, complex acceleration, and complex driving force. The ratio of the complex driving force to the complex velocity is called the mechanical impedance Z of the system. Thus
Z = Fo exp(iw t)/ dx/dt = R + i (w m-K/w )
Note that the absolute value, |Z| , of this quantity is
The mechanical impedance, Z, the driving force, Fo exp(iw t) and the velocity, dx/dt play roles in a mechanical system that are analogous to the roles played by the electrical impedance, the voltage, and the current in an electrical circuit. {Electrical impedance is defined as V/I where V is the voltage and I is the current.} The quantity w m - K/w is sometimes called the mechanical reactance because it is analogous to the reactance in an electrical circuit.
1.11 Real Systems Modeled as Driven Oscillators
A number of real systems can be modeled with some success as driven
harmonic oscillators. Rotating machines (electric motors, fans, turbines,
etc.) are subject to periodic forces which arise from an eccentricity or
imbalance in the rotating system. For analysis of the resulting vibrations,
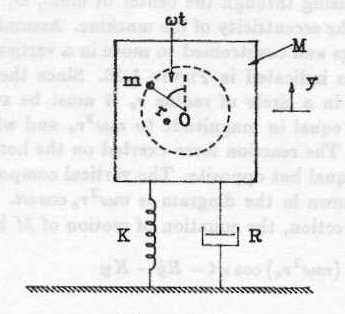
the machine often is modeled as a mass M (equal to the mass of the machine)
to which is fastened by means of a light rod of radius re, a small mass
m which rotates with an angular velocity w about a horizontal axis passing
through the center of mass, O, of M. The product mre is a measure
of the eccentricity of the machine. Assuming that the machine is mounted
on springs and constrained to move in a vertical direction, the model can
be depicted as indicated in Figure 1.10.
Figure 1.10
Since the mass m is moving with constant speed in a circle of radius re it must be subjected to a force (exerted by the rod) equal in magnitude to mw2re and which at any instant is directed toward O. The reaction force exerted on the horizontal axis (assumed fastened to M) is equal but opposite. The vertical component of this latter force at the instant shown in the diagram is mw2re / cos w t Taking the vertical direction as the y direction, the equation of motion of M is
Md2y/dt2 = mw2re
/ cos w t - R dy/dt - Ky
or
Md2y/dt2 + R dy/dt + Ky = mw2re
/ cos w t
If Fo is substituted for mw2re
is last expression is identical in form with Equation (1.17).
The loudspeaker which is widely used in radio, television, and high fidelity sound systems is a second example of a physical system that is frequently modeled as a driven harmonic oscillator. When a sinusoidally varying current is set up in the voice coil of the speaker, the interaction of the current with the magnetic field of the speaker gives rise to a harmonic driving force on the voice coil. As the coil and cone vibrate, sound is radiated and thermal energy is generated in the cone. In the model, the loss of energy from these two mechanisms is attributed to a damping force proportional to the velocity. An elastic corrugated membrane called the spider and the speaker cone provide the restoring force on the voice coil. A more detailed description of this model and its success in predicting loudspeaker performance is given in Chapter 12.
Example 1.4
Typical values of R, K and m for a 16 inch loud speaker
modeled as a driven harmonic oscillator are 2.5 kg/s, 3000 N/m and 0.05
kg,respectively.
(a) What is the resonant frequency of this loudspeaker?
(b) What is the mechanical impedance Z of this speaker
at 70 Hz?
(c) Above what frequency can this system be considered
as a mass controlled oscillator?
(d) If this speaker is driven by a harmonic driving
force at a frequency of 70 Hz, what will be the phase difference between
the driving force and the velocity? Which leads?
Solution
(a) fr = 1/(2p
) Ö (K/m) = 1/(2p
) Ö (3000/0/05) = 39 Hz
(b) w = 2p
(70) = 140 s-1
Z = R + i(w m-K/w
) = 2.5 + i ((440)(0.05) - 3000/440)
= 2.5 + 15.2 i kg/s
(c) Assume that the criteria for a mass controlled oscillator is w m>10 R and w m>10K/w . Then
w m = (2p f)(0.05) = 10 K/w = (10)(3000)/(2p f) ® f = 123.3 Hz
(d) Using Equation(1.42)
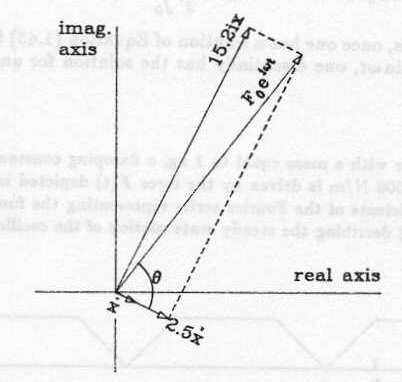
Representing dx/dt in the complex plane in an arbitrarily
chosen position, one finds 2.5 dx/dt and 15.2 i dx/dt, then adds them vectorially
to find Fo exp(iwt) The angle q = arctan(15.2/2.5)
= 80.7o . Thus Fo exp(iw
t) leads dx/dt by 80.7o . (One could also observe that 2.5 +
15.2 i = 15.4 exp(iq ). Then Fo exp(iw
t) = (dx/dt)(15.4 exp(iq ), so its magnitude
is 15.4 times that of dx/dt and its phase is advanced by 80.7o,
over that of dx/dt : it leads by 80.7o.)
1.12 Non Sinusoidal Periodic Driving Forces
The linear differential equation,
(1.43) m d2x/dt2 + R dx/dt + K x = F(t)
which represents the equation of motion of damped oscillator driven bya force, F(t), has the property that if x1(t) is a solution for a driving force f1(t), x2(t) is a solution for driving force f2(t), x3(t) is a solution for driving force f3(t) and so on, then x1(t) + x2(t) + x3(t)+ ... is a solution for driving force f1(t) + f2(t) + f3(t) + ... It follows that if a force F(t) can be expressed as the sum of the forces f1(t), f2(t), f3(t), ..., then the solution can be expressed as the sum å xi(t).
If F(t) is periodic with a period, T, then it may be expressed as a Fourier series
(1.44)
F(t) = ao/2 + ån=1infinity
(an cos wnt + bn
sinwnt)
where
(1.45)
an = (2/T) ò0T
F(t)
cos wnt dt
bn = (2/T) ò0T
F(t)
sin wnt dt
and wn = n(2p /T). It follows that the solution of Equation (1.43) for any force F(t) which is periodic with period, T, is the sum of the solutions of the equations involving the coefficients an and bn.
Example 1.5
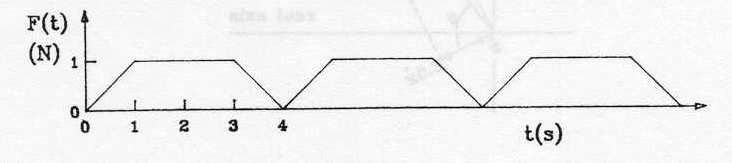
A harmonic oscillator is driven by the force F(t) depicted in the figure below.
(a) Find the coefficients of the Fourier series representing
the function F(t).
(b) Find the function x(t) describing the steady state
motion of the oscillator.
Solution
(a) The function F(t) has a period, T=4 s and is defined by
F(t) = t
0<= t <= 1 s
F(t) = 1 1<=
t <= 3 s
F(t) = -t+4 3 <= t <= 4 s
The coefficients of the series representing this F(t) are found from equation (1.45). Since, over the interval from 0 to T, F(t) is symmetric about the vertical line t=T/2, then the integral ò0 T/2 F(t) sin np t/2 dt is zero for all n. (This result may be made evident by sketching in sin 0.5p t in the figure.) Thus, bn = 0 for all n. The an coefficients are given by
an = (2/4)[ ò0t t cos 0.5np t dt + ò13 cos 0.5p t dt + 3ò4 (-t+4) cos .5p t dt ]
The integrals are readily evaluated numerically, yielding a0 = 1.5 N, a1 = -0.4053 N, a2 = -0.2029 N, a3 = -0.0450 N, a4 - 0.0003 N and so on.
(b) One must find the steady-state solutions of the following equations
m d2x/dt2 + Rdx/dt + K x = ao/2
m d2x/dt2 + Rdx/dt + K x = a1 cos w1t
m d2x/dt2 + Rdx/dt + K x = a2 cos 2w1t
and so on. It is easily verified that a particular solution of the first equation is ao/(2K). All the remaining equations are identical in form to equation (1.17) and have solutions
xn = [an/(wnZn)]
sin (wnt - qn)
where
wn = np /2
Zn = Ö (R2 + (wnm-K/wn
)2)
tan qn = (wn
m - K/wn)/R
Substituting numerical values for an, R, K and m, and adding the separate solutions, one obtains the following series describing the steady state solution of the oscillator
x(t) = 7.5 x10-4 - 4.063 x 10-4 sin(0.5p t + 1.57) -2.049 x 10-4 sin(p t + 1.56)