home()
The robot should spin in a circle until it detects the docking station or virtual wall signal.
It should then drive forward and stop when it makes contact with the virtual wall or docking station.
In order to implement this function, the robot must use feedback from the bumpers and IR signals emitted by the virtual wall and docking station.
The robot will receive a 1 from the virtual wall sensor infrared signal when it is within range.
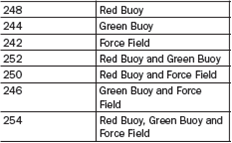
The docking station emits signals based upon the following figures.