(30 pts) File output and string formatting: Storing information in files is a very important exercise for engineers running experiments that generate a large quantity of useful data. The stored data can later be analyzed, categorized, and manipulated to allow engineers to draw useful conclusions.
Often, the generated data is formatted so that another
program can automate the process of analyzing, categorizing,
and manipulating the data. In this problem you are to write a program,
funcDump.py, that implements the following design:
- Prompt the user for a file name
- Open a file with the given name
-
Write 720 lines to the file. Each line should have the data:
n 200 + 200cos(nπ/180)
where n ranges from 0 to 719. Make sure the file is neatly formatted so numbers and decimal points line up. Below is a sample of the expected output. Your program's output should match this format exactly.
98 172.165 99 168.713 100 165.270 101 161.838 102 158.418 103 155.010 104 151.616 105 148.236 106 144.873 107 141.526 108 138.197 109 134.886 110 131.596 111 128.326 112 125.079 113 121.854 114 118.653 115 115.476 116 112.326 117 109.202 118 106.106 119 103.038 120 100.000 121 96.992 122 94.016
- Close the file
Submit your Python source file and the generated output to the funcDump Drop Box in the Homework 5 folder on ANGEL.
- Install Eclipse by following these instructions. (Upperclassmen need to update to Eclipse 3.4; freshmen can skip this.)
- Install and configure PyDev for Eclipse by following these instructions. (Upperclassmen need to do all of this; freshmen can skip the beginning and start at step 3 of Install the PyDev plug-in for Eclipse.)
- Install and configure Subclipse for Eclipse by following these instructions. (Everyone needs to do this.)
- You must show us in class next session (if you haven't
already):
- Launch Eclipse and show us your Hello World Python program running.
- In Eclipse, show us your modified "spam.py" file that you checked out using Subclipse. If you didn't get this working, instead choose Window > Open Perspective > Other..., and show us that "SVN Repository Exploring" appears in the list.
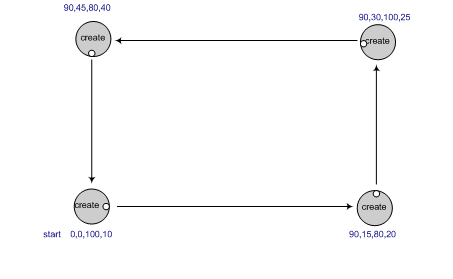
- Prompt the user for the port to which they are connected.
- Prompt the user for the file name and open the file with that name.
- Read each line of the file. Each line will contain 4 values (
turnAngleInDeg, turnVelocity, fwdDistanceInCm, fwdVelocity) - For each line, turn the robot based upon the turn angle and speed,
then drive the robot forward based upon the forward distance and velocity.
For example (this is box.txt):
- You will likely use the go(), sleep(), and stop() functions to move the robot, as you did last time. This is easiest, since it sends a command, waits the right amount of time (which you'll have to calculate), then sends the next command, etc.
- Don't forget to close both the file and the connection to the robot (using robot.shutdown()) at the end of your code!