home()
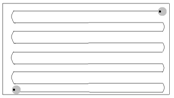
For the cover() function, the robot should drive forward until it encounters a wall or virtual wall.
It should follow the wall for 1 foot and then turn 90 degrees and drive forward until it encounters a wall (physical or virtual).
In this way, the robot should cover the room in a zig zag fashion (see following figure).